 International
International Singapore
Singapore Malaysia
Malaysia Thailand
Thailand Vietnam
VietnamYour shopping cart is empty!

IoT-Based Pet Feeder Using NodeMCU-32S
- Abdulrahman Alhamed
- 20 Oct 2022
- 1097
When you go to work don't forget about your lovely pet! They must be waiting for their food. Even if you are working in the office, you still can take care of your pet. But how is that even possible?
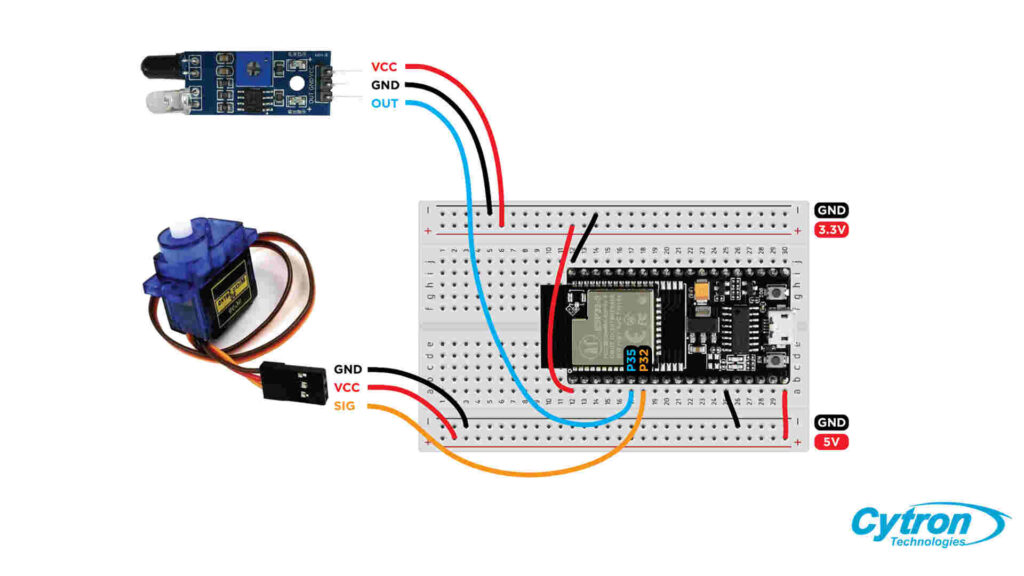
This project is mainly about how to feed your pet remotely. Using an infrared sensor, you can know the presence of your pet near the food container. When the infrared sensor detects the pet, you will get a notification which means that your pet is hungry! You can directly open the food container remotely by using the V-One dashboard. Then, change to another compartment of the container for the next meal with the help of a servo.
Video Tutorial
Components Required
- NodeMCU-32S
- Breadboard
- Infrared Sensor
- Servo
- Jumpers
You can get all these components from Cytron IoT kit here
Circuit Diagram
Workflow Code
Arduino Code
References
Related Products
%202-268x268.jpg "NodeMCU-ESP32S IoT Kit - Simplifying IoT with V-ONE") -10%
-10%NodeMCU-ESP32S IoT Kit - Simplifying IoT with V...
Discontinued
x 1 unit(s)