 International
International Singapore
Singapore Malaysia
Malaysia Thailand
Thailand Vietnam
VietnamYour shopping cart is empty!

Getting Started with Maker Drive and Raspberry Pi
- Idris Zainal Abidin
- 06 Mar 2019
- 826
INTRODUCTION
Besides interfacing Maker Drive with microcontroller, it also can be controlled by operating system controller like Raspberry Pi. This tutorial will show you how to setup and program your Pi to drive the DC motor using Maker Drive.
You may need to refer this tutorial first:
VIDEO
This video will show you on how to get start with Maker Drive and Raspberry Pi.
Untuk versi Bahasa Melayu, sila rujuk video dibawah.
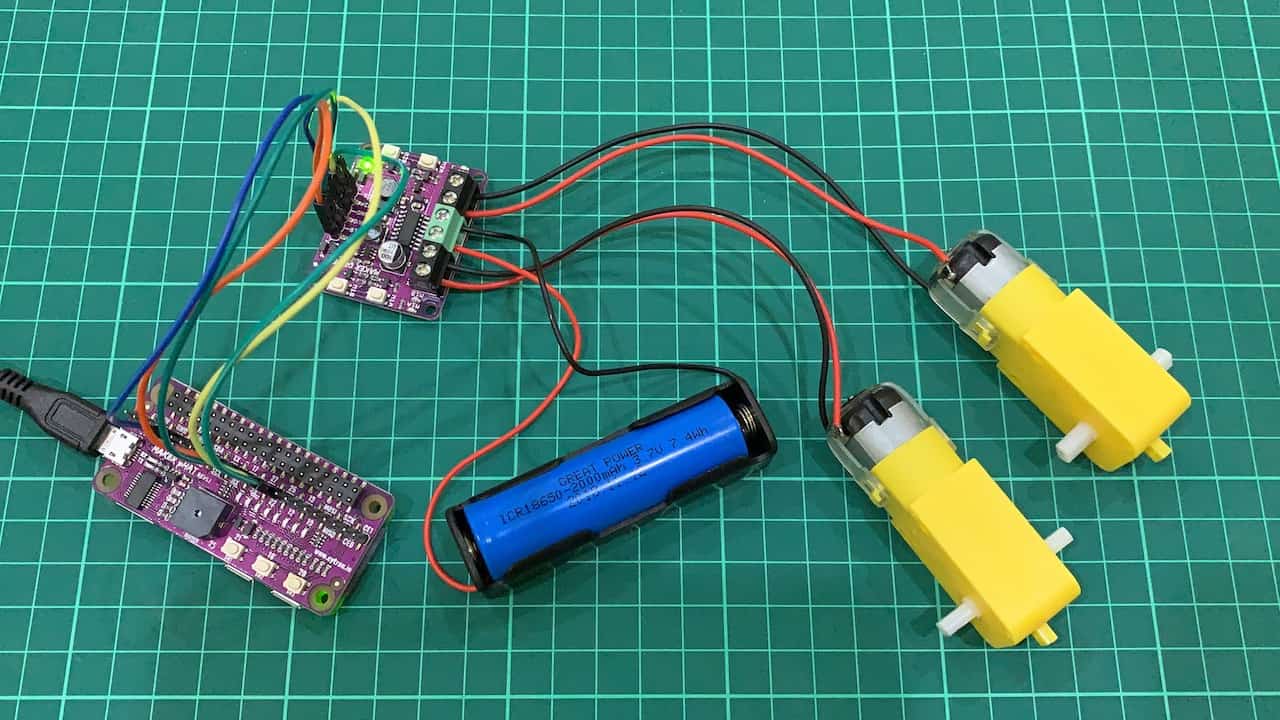
HARDWARE PREPARATION
Below is the list of items used in the video.
- Maker Drive
- Raspberry Pi Zero WH (with Header)
- TT Motor + Wheel Kit
- 3.7V 2000mAh Li-Ion Battery
- 1x18650 Battery Holder
- 40 Ways Female to Female Jumper Wire
Wiring connection table.
| Raspberry Pi | Maker Drive | DC Motor | Battery |
| GPIO 17 | Pin M1A | ||
| GPIO 18 | Pin M1B | ||
| 5V0 | |||
| GND | GND | ||
| GPIO 27 | Pin M2A | ||
| GPIO 22 | Pin M2B | ||
| Terminal M1A | DC Motor 1 | ||
| Terminal M1B | DC Motor 1 | ||
| VB+ | Positive | ||
| VB- | Negative | ||
| Terminal M2A | DC Motor 2 | ||
| Terminal M2B | DC Motor 2 |
Sample Code
This is sample code used in the video. Please run pigpio daemon on terminal (sudo pigpiod) before run the program.
Thank You
References:
Thanks for reading this tutorial. If you have any technical inquiry, please post at Cytron Technical Forum.
Related Products

x 1 unit(s)

TT Motor with Wheel Kits
$1.63++ $1.63
x 1 unit(s)

3.7V 2000mAh Li-Ion Battery
Not Available
x 1 unit(s)