 International
International Singapore
Singapore Malaysia
Malaysia Thailand
Thailand Vietnam
VietnamYour shopping cart is empty!

Obstacle Avoiding Robot
Since we have successfully build Bluetooth Mobile Robot, let’s try to turn this robot to an “Obstacle Avoiding Robot” by adding an ultrasonic sensor to it. This robot will avoiding any obstacle in distance of 10 cm in front of it. Just follow this tutorial to know more .
HARDWARE PREPARATION
This tutorial use :
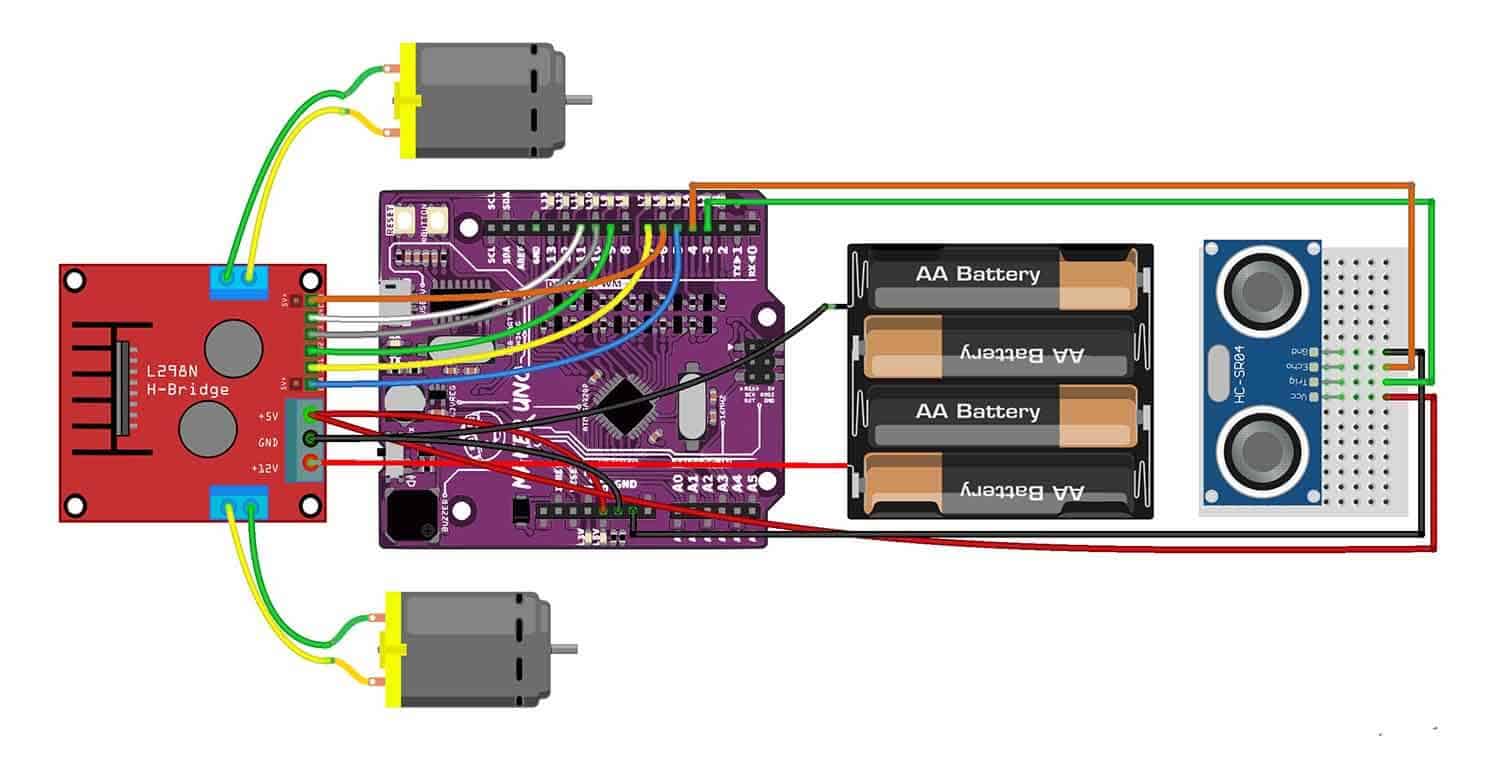
You can make the hardware connection based on the diagram and table below.
Connection | |
|---|---|
| Ultrasonic : Trig | Maker UNO: Pin 3 |
| Ultrasonic : Echo | Maker UNO: Pin 4 |
| Ultrasonic : GND | Maker UNO: GND |
| Ultrasonic : VCC | L298ND : 5V |
| L298ND : ENA | Maker UNO: Pin 5 |
| L298ND : ENB | Maker UNO: Pin 6 |
| L298ND : IN1 | Maker UNO: Pin 7 |
| L298ND : IN2 | Maker UNO: Pin 9 |
| L298ND : IN3 | Maker UNO: Pin 10 |
| L298ND : IN4 | Maker UNO: Pin 11 |
Sample Code
This is the sample code used for this tutorial. Try it!
Thank you
Thank you for reading this tutorial and we hope it helps your project development. If you have any technical inquiry, please post at Cytron Technical Forum.