 International
International Singapore
Singapore Malaysia
Malaysia Thailand
Thailand Vietnam
VietnamYour shopping cart is empty!

Let's Arduino Control Your SmartDriveDuo-60
- Idris Zainal Abidin
- 25 Jan 2017
- 919
Last Updated on 25 January 2017
SmartDriveDuo-60 is a smart and powerful dual motor driver from Cytron Technologies. Even this motor driver is able to accept multiple types of input (RC, analog, PWM, serial), most of users choose RC mode to control a combat robot. Why? Because this mode is totally plug and play. In other words, users don't need to have a programming knowledge to make their robot move. However, there still have users ask on how to control MDDS60 with Arduino. Maybe they want to make their robot smarter? Yes of course, and it is good. So this tutorial will guide you to get start.

First of all, we need to set mode for MDDS60 to determine what kind of program to be write in Arduino. So currently we have 3 modes which suitable for that:
1. PWM mode: Independent Both (0b10110100)
2. Serial Simplified: Set baudrate to 9600 (0b11001100)
3. Serial Packetized: Set ID to 0 (0b11100000)
PWM Mode: Independent Both
1. Program your Arduino with the following codes. Then disconnect Arduino from the USB.
2. Set switch mode on MDDS60 to 0b10110100.
3. Connect all the wires as shown below and last connect the battery.
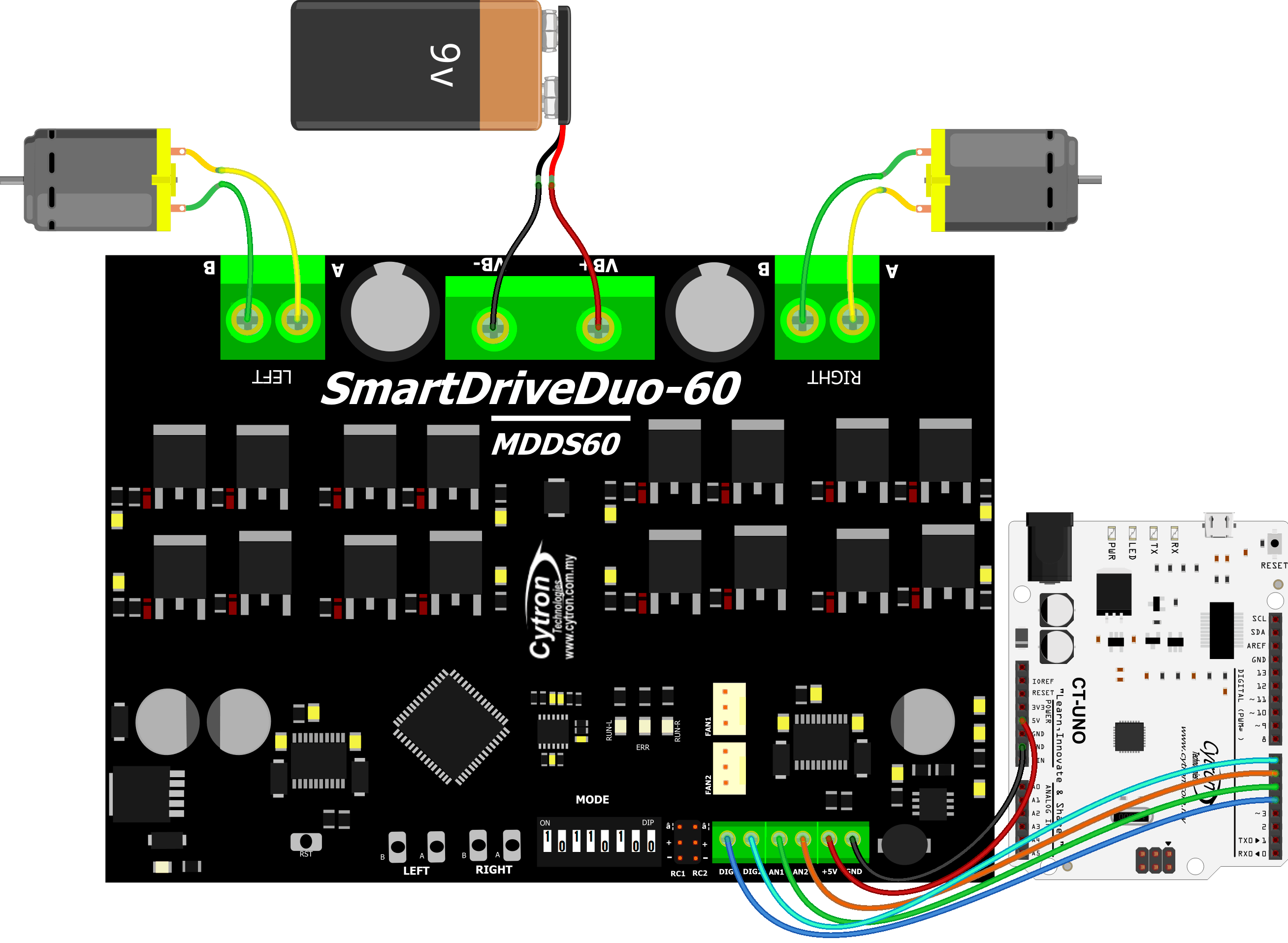
*9V battery is only to show how to make a connection between MDDS60 and battery. Use a suitable battery for your application.
**Please make sure there only one 5V supply to Arduino board.
4. Once MDDS60 and CT UNO is powered up (and all connections is complete), both motor will start moving alternately.
Serial Simplified: Baudrate 9600
1. Program your Arduino with the following codes. Then disconnect Arduino from the USB.
2. Set switch mode on MDDS60 to 0b11001100.
3. Connect all the wires as shown below and connect the battery
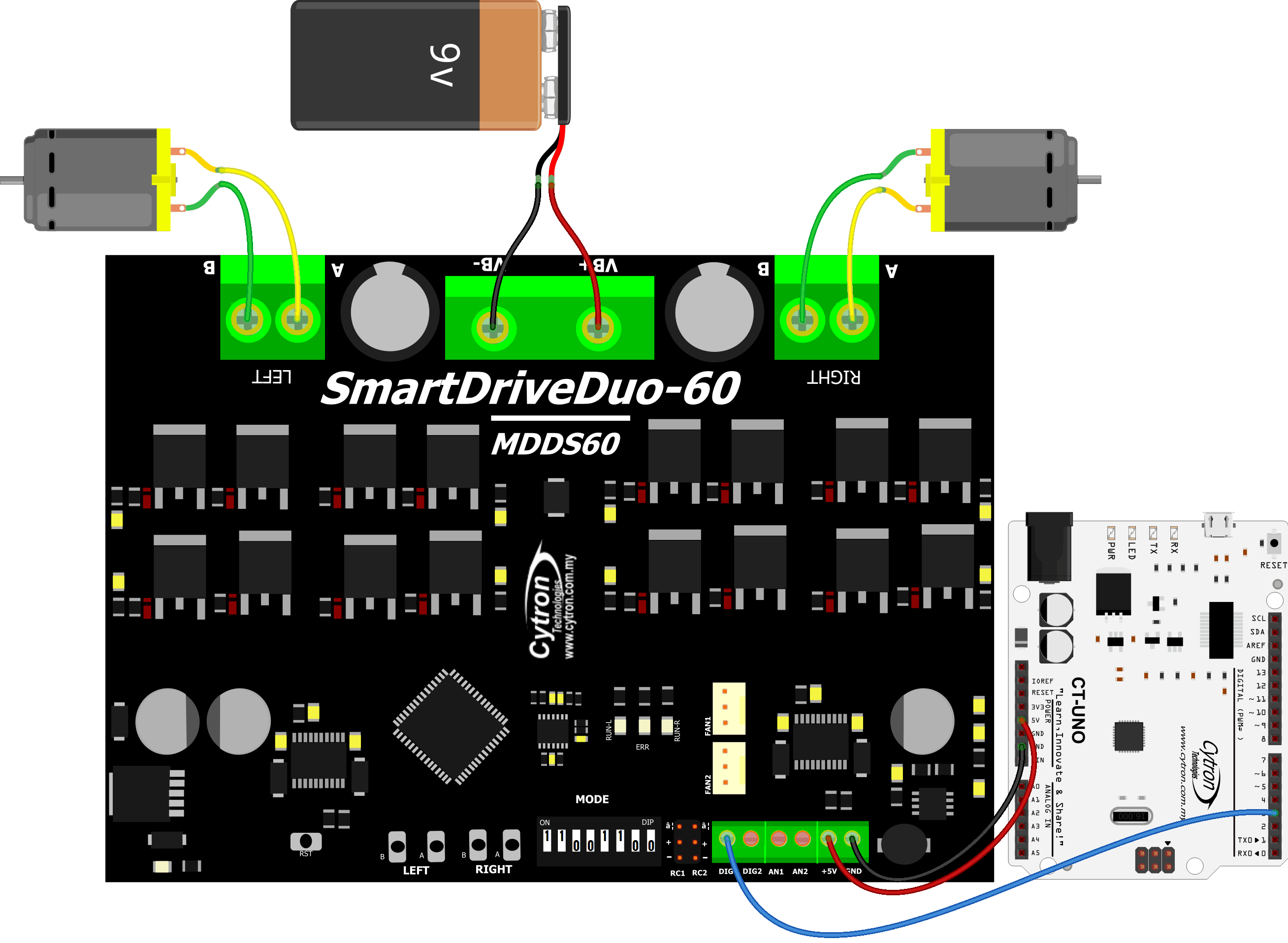
*9V battery is only to show how to make a connection between MDDS60 and battery. Use a suitable battery for your application.
**Please make sure there only one 5V supply to Arduino board.
4. Once MDDS60 and CT UNO is powered up (and all connections is complete), both motor will start moving alternately.
Serial Packetized: ID is 0
1. Program your Arduino with the following codes. Then disconnect Arduino from the USB.
2. Set switch mode on MDDS60 to 0b11001100.
3. Connect all the wires as shown below and connect the battery
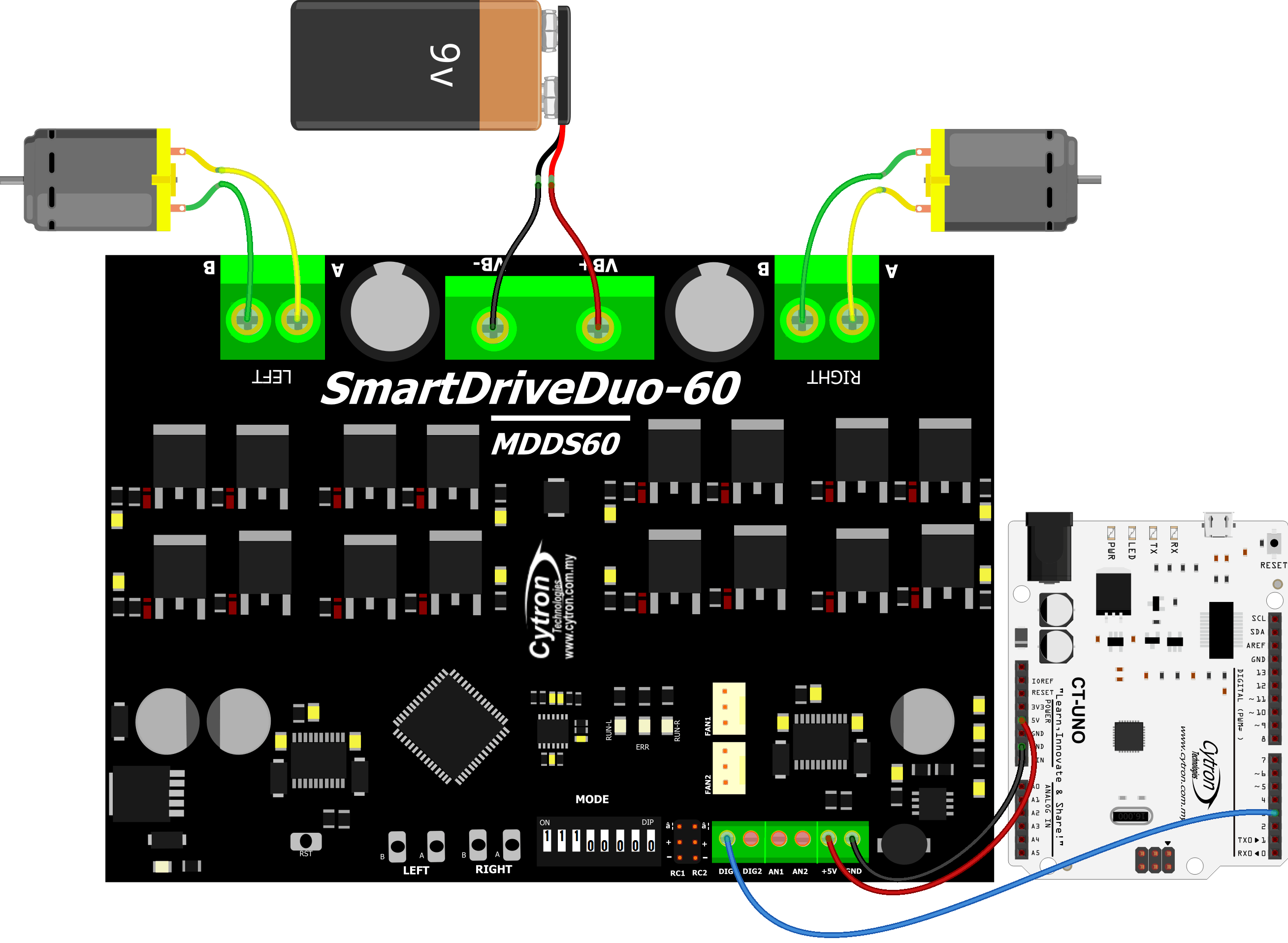
*9V battery is only to show how to make a connection between MDDS60 and battery. Use a suitable battery for your application.
**Please make sure there only one 5V supply to Arduino board.
4. Once MDDS60 and CT UNO is powered up (and all connections is complete), both motor will start moving alternately.
References
For more information, please refer to SmartDriveDuo-60 User's Manual.
So, that's all from me. Thanks for visit and I hope this tutorial helps. :)
Note: For further inquiry, kindly visit to Cytron Technical Forum as we seldom check the comment here.
Related Products
")
60Amp 7V-45V SmartDrive DC Motor Driver (2 Chan...
$180.00 $180.00
x 1 unit(s)