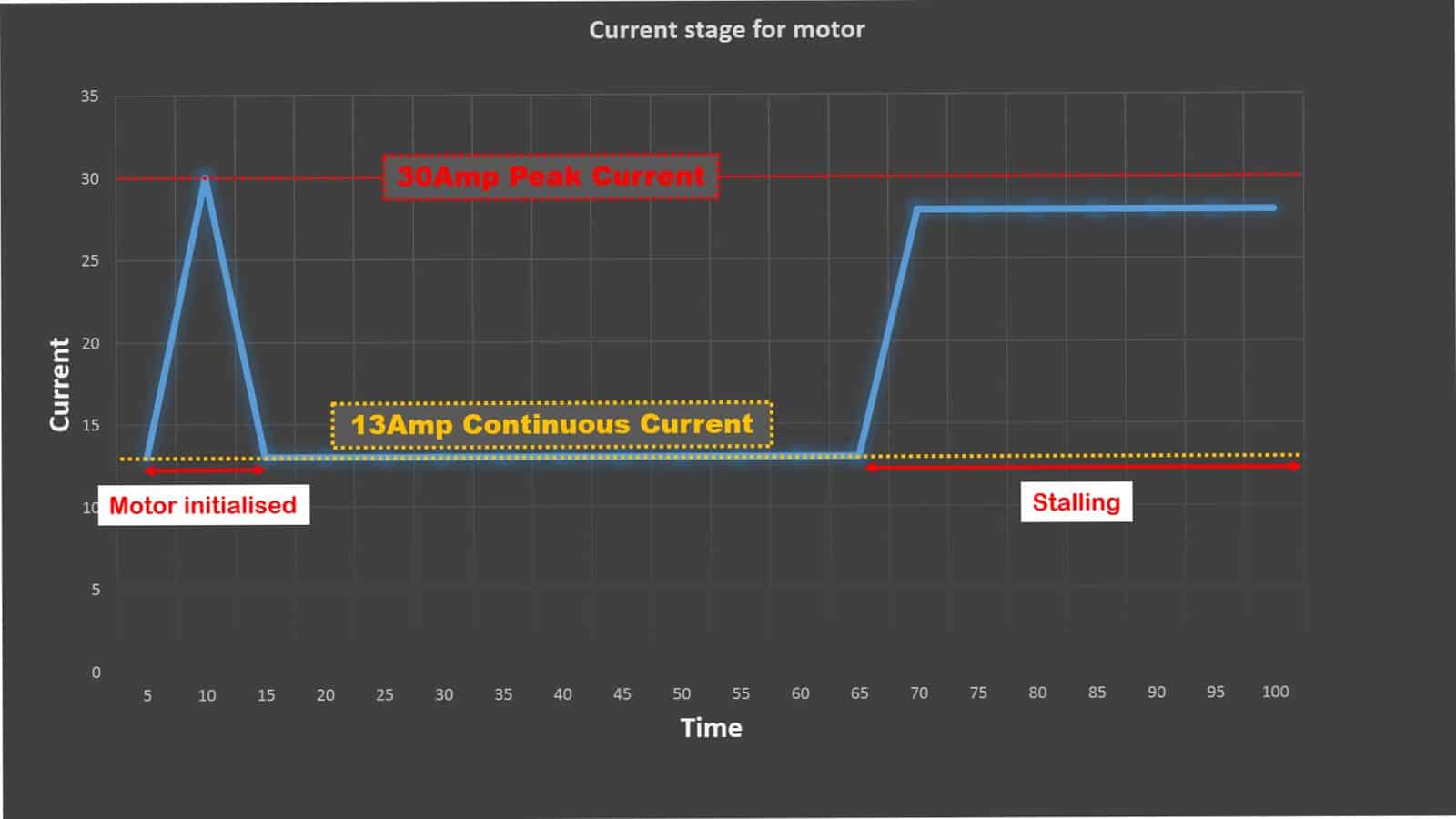
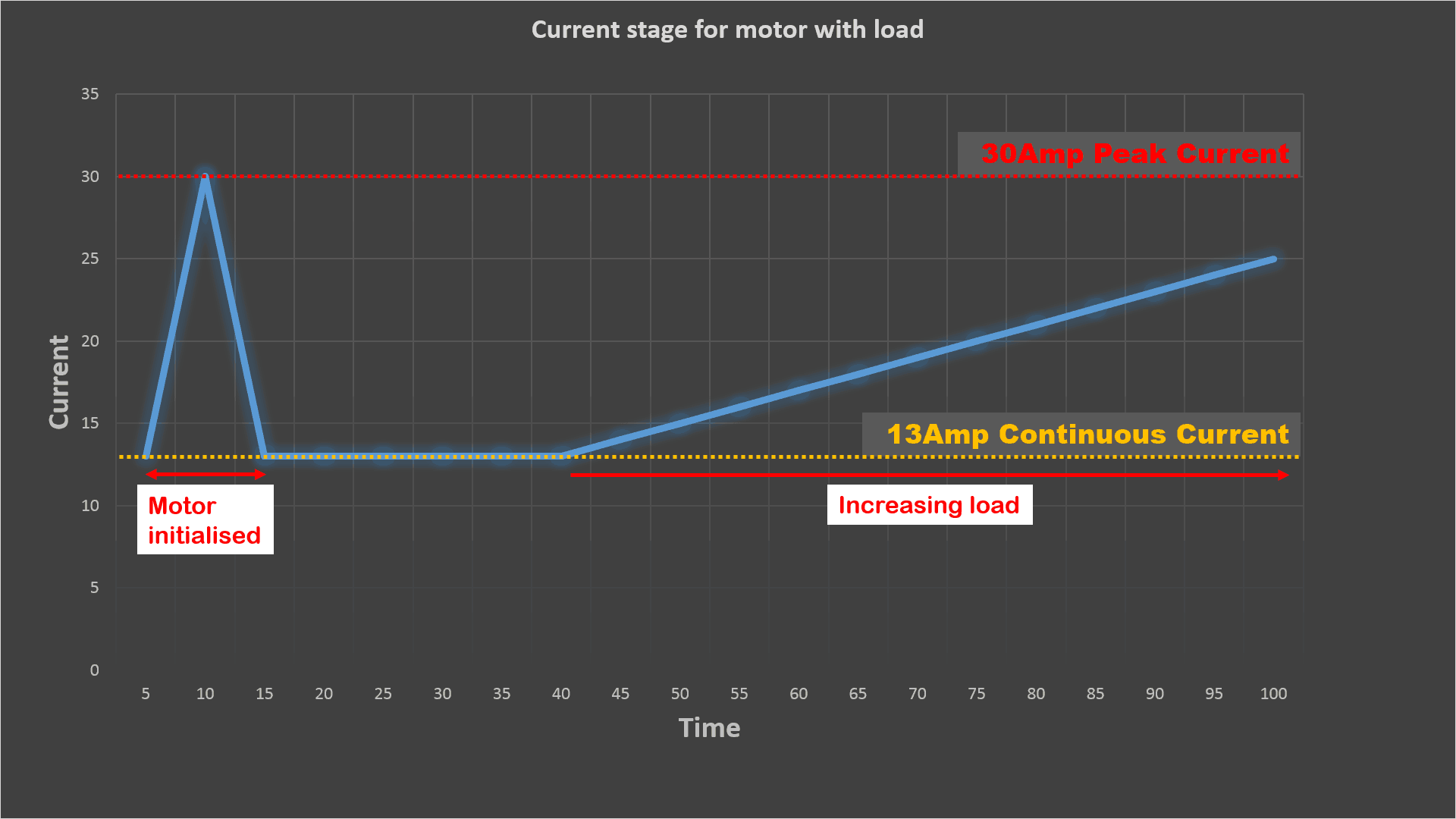
As an unloaded DC motor spins, it generates a backwards-flowing electromotive force that resists the current being supplied to the motor. The current through the motor drops as the rotational speed increases, hence a free-spinning motor has very little current. It is only when a load is applied to the motor that slows the rotor that the current draw through the motor increases.
When load is increases, the current will increases. At some point the load increases to the point where the motor cannot provide more torque then the motor will stall, the back EMF will be zero and the curent tends towards the supply voltage divided by the DC resistance of the winding.
What will cause the current to go high?
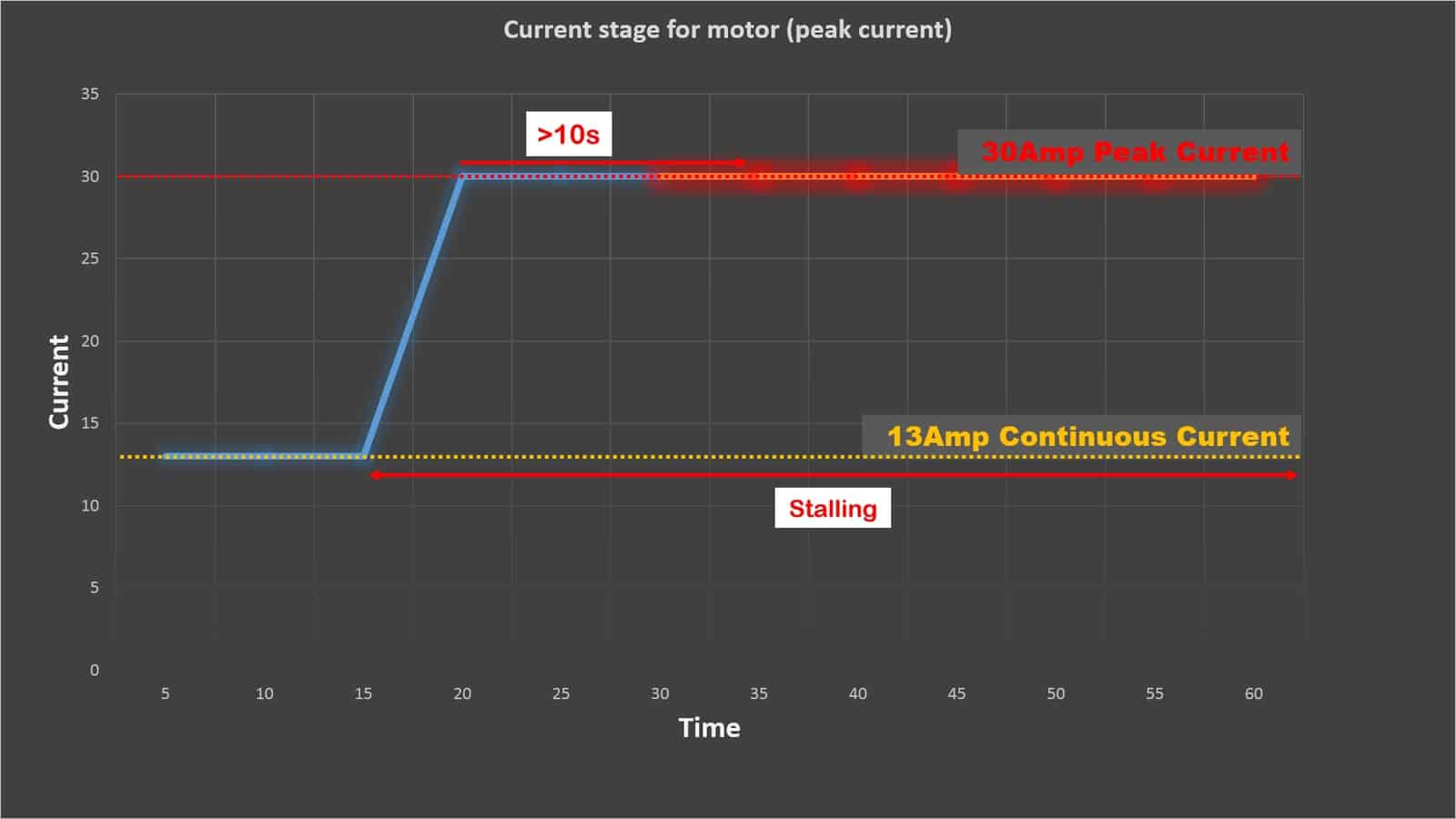
If external force is applied to the motor and cause the motor stop suddenly, it will draws a very high current at that time. This is call stalling which basically forcing them to the highest current, as they are in an overload condition.
If the motor stall for a longer time, this will cause the motor driver to heat up and damage the components of the motor driver. Eventually, causing the motor driver to be malfunction.
Basically, when the motor is at no load, the motor draw the least current. The current drawn will increase with the load. So, when the motor is force to stop, it will have the highest current drawn.
If any products that state the max current is xxA. Most of the people will misunderstand that it is the continuous current that the motor driver supports.
Max xxA ≠ Continuous Current
In real, it is not what you expect. The maximum current is not necessary means that the motor driver can continuously output the current for the motor. If you let the motor driver to output the maximum current continuously, it may overheat the motor driver.
Current protection is important for motor driver, preventing it from overheating or maybe explode. When the current output exceed the peak current, it will automatically limit the current to the maximum current only. This is a safety feature that protect your motor driver.
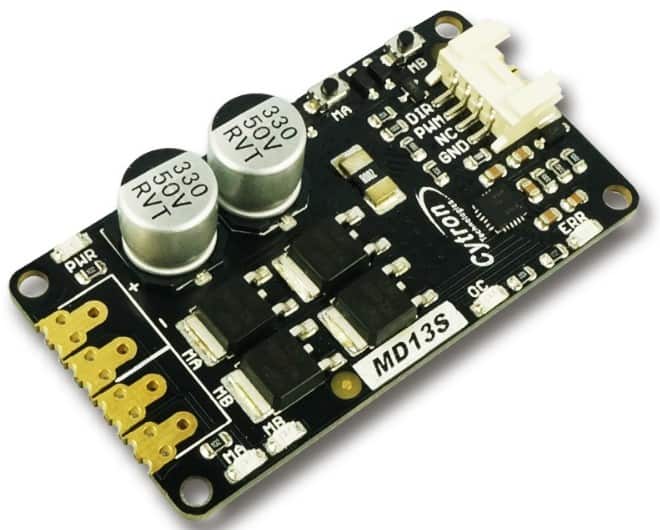
Cytron recently have introduced a small yet powerful motor driver. The MD13S has been designed with the capabilities and features of:
- Maximum current up to 13A continuous (without heatsink at 25℃) and 30A peak (10 second).
- Current limiting at 30A.
If the motor driver output current for 30A for more than 10s, it will cause the components to overheat and being damaged.
SmartDriveDuo-10 is one of the latest smart series motor drivers designed to drive medium power brushed DC motor. Besides, it also equipped with a microcontroller unit to provide thermal protection. It can limit the output current stage by stage to prevent itself from overheating or burnt. The temperature sensor will give the temperature feedback for current limiting to prevent the overheating of MOSFET.
With the on board temperature sensor, this smart driver is able to limit the output current stage by stage to prevent itself from overheat and burnt.
- Support up to 10A continuous current at room temperature.
- Support up to 30A peak for 1 second. Current will be limited as temperature raises.
 International
International Singapore
Singapore Malaysia
Malaysia Thailand
Thailand Vietnam
Vietnam