International
International Singapore
Singapore Malaysia
Malaysia Thailand
Thailand Vietnam
VietnamYour shopping cart is empty!

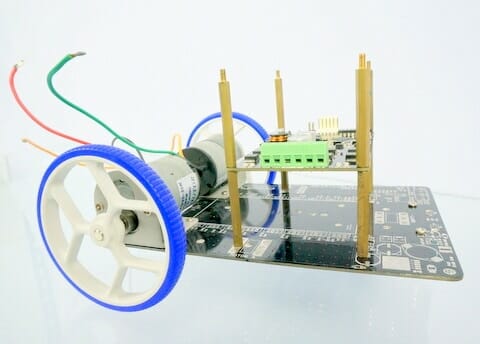
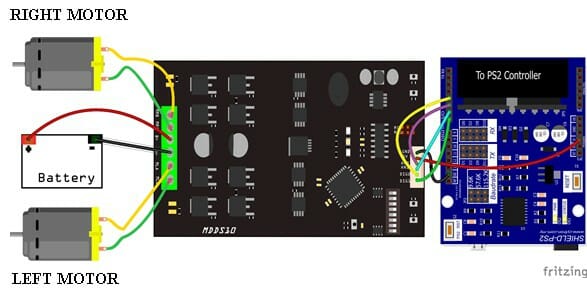
Ever wanted to build a simple mobile robot that can be controlled by a wireless PS2 controller? Think it’s too difficult for you? Well, think about it again. Because it’s actually easy and straight forward. In this tutorial, I will show you how to build the robot step by step.


-800x800")